Итак будем управлять двумя реверсивными (вращение в обе стороны) двигателями: основным и рулевым. Питать их будем от аккумулятора 3,7 В, но можно и до 12 В в принципе подавать, если согласовать питание контроллера или организовать его отдельным аккумулятором.
В силовой части используем простейший миниатюрный драйвер шагового двигателя l9110s или же можно использовать сборку на L293\8 или любой не менее мощный, который вы найдёте. В общем я всё нарисовал на картинке.
Приобрести комплектующие для проекта можно на алиэкспресс:
WiFi контроллер использован мой любимый NodeMCU 0.9 ESP8266 , но можно использовать и меньший размером WeMos D1 mini.
Аккумулятор можно зарядить через микро-USB, после чего он питает драйвер двигателей напрямую и WiFi-контроллер через повышающий преобразователь до 5 В .
Код программы:
#include
const char* ssid = "имя вашей сети вайфай";
const char* password = "пароль вашей сети";
int up = 2; //номера дискретных выходов
int down = 14;
int left = 4;
int right = 12;
// Create an instance of the server
// specify the port to listen on as an argument
WiFiServer server(80);
void setup() {
Serial.begin(9600);
delay(10);
//подготовка выходов
pinMode(up, OUTPUT);
digitalWrite(up, 0);
pinMode(down, OUTPUT);
digitalWrite(down, 0);
pinMode(left, OUTPUT);
digitalWrite(left, 0);
pinMode(right, OUTPUT);
digitalWrite(right, 0);
// Connect to WiFi network
Serial.println();
Serial.println();
Serial.print("Connecting to ");
Serial.println(ssid);
WiFi.begin(ssid, password);
While (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected");
//Запуск сервера
server.begin();
Serial.println("Server started");
//выводим IP адрес в монитор порта
Serial.println(WiFi.localIP());
}
void loop() {
//проверяем подключился ли клиент
WiFiClient client = server.available();
if (!client) {
return;
}
//Ожидаем пока клиент не пришлет какие-нибудь данные
Serial.println("new client");
while(!client.available()){
delay(1);
}
//Чтение первой строки запроса
String req = client.readStringUntil("\r");
Serial.println(req);
client.flush();
//обработка команды
if (req.indexOf("/gpio/up") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
}
else if (req.indexOf("/gpio/down") != -1){
digitalWrite(up, 0);
digitalWrite(down, 1);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
}
else if (req.indexOf("/gpio/left") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
digitalWrite(left, 1);
digitalWrite(right, 0);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 0);
}
else if (req.indexOf("/gpio/right") != -1){
digitalWrite(up, 1);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 1);
delay(1000);
digitalWrite(up, 0);
digitalWrite(down, 0);
digitalWrite(left, 0);
digitalWrite(right, 0);
}
else {
Serial.println("invalid request");
}
Client.flush();
// подготовка к ответу
String s = "HTTP/1.1 200 OK\r\nContent-Type: text/html\r\n\r\n\r\n\r\n ";
S += "
UP
";
s += "
LEFT ";
s += "RIGHT
";
s += "
DOWN";
s += "
// Send the response to the client
client.print(s);
delay(1);
Serial.println("Client disonnected");
} Программа написана в Arduino IDE. Как настроить Arduino IDE для работы с контроллером NodeMCU 0.9 ESP8266 посмотрите по ссылке. После загрузки программы в контроллер, монитором порта можно прочитать IP-адрес, который плата получит после соединения с вашим WiFi-роутером. В браузере компьютера необходимо в адресной строке прописать этот адрес и перейти на страницу, которую сгенерирует программа контроллера. Она будет выглядеть следующим образом:
DOWN
При нажатии на ссылку UP, машинка проедет вперед в течении 1сек и остановится. При нажатии на DOWN, машинка 1 секунду будет ехать назад. LEFT - двигатель поворота повернёт колёса влево и машинка проедет 1 сек влево. То же самое и вправо при нажатии на RIGHT.
Вся эта система будет работать только при настроенной WiFi-точке доступа (WiFi-роутере), но в будущем мне интересно поиграться с контроллером NodeMCU 0.9 ESP8266 , который сам будет организовывать точку доступа и выполнять функцию WEB-сервера, тоесть при заходе на его айпи из браузера, будем видеть web-страничку с элементами управления. Так же интересно организовать передачу данных с одного такого контроллера в другой посредством их автономной WiFi-сети.
RC машинка может быть WiFi машинкой...?
RC машинка это хорошо, но дешевые RC машинки имеют ограниченный диапазон и управляются только определённым пультом поставляемым в комплекте.
Я купил RC джип 4х4 с гибкой подвеской и внедорожными шинами примерно за 30 долларов. Поигравшись с машинкой я решил, что её можно улучшить при помощи Wi-Fi и Android. Потратив немного времени, я полностью удалил плату из машинки. Я замерял напряжения на этой плате и разработал систему управления двигателем при помощи Arduino. Оригинальная система управления не использует ШИМ для контроля скорости. Машинка рассчитана на переезд через препятствия на очень низкой передаче, и как следствие очень медленно. В моей же схеме используется ШИМ.
Я использую Arduino уже несколько месяцев. Я также приобрел asynclabs WiFi Sheild для Duemilanoe Arduino, чтобы экспериментировать с WiFI. Он поставляется с библиотекой, устанавливаемой в Arduino IDE. Я смог сделать программу, которая позволяет управлять двигателями и направлением движения при помощи WiFi.
При помощи Visual Studio я разработал окно программы, которая подключается к серверу автомобиля и дает ему команды. Затем после нескольких попыток я написал приложение для Android, которое использует акселерометр для управления машинкой.
Инструменты и элементы
Это общий список инструментов и элементов, которые использовались в этом проекте. В документации Eagle указаны точные технические характеристики используемых компонентов.

Мультиметр
Паяльник
Припой
Отвертки
Раствор для травления плат
Фольгированый стеклотекстолит
Плоскогубцы
Arduino
AsyncLabs WiFi Sheild
Разъёмы RJ45
Драйвер двигателя с H-мостом
Конденсаторы

Драйвер двигателей

Используя Eagle, я разработал эту схему и сделал печатную плату для неё. Она функционирует как драйвер двигателей и регулятор их мощности для Arduino.
Это позволяет использовать стандартный 7.2В аккумулятор для питания основных и рулевых двигателей и Arduino.
В этой схеме используется двойной интегральный драйвер с Н-мостом SN754410 для управления двигателями. Выводы управления драйвера подсоединены к кабелю RJ45, который подключается к AsyncLabs WiFi Sheild.
Arduino Shield

Используя библиотеку SparkFun в Eagle я разработал Arduino Shield, через который будут проходить контакты с WiFi Shield и подключаться к драйверу двигателя через разъем RJ45 и 2 винтовые клеммы.
Цоколевка контактов RJ45 очень важна. Ошибка в подключении может привести к непредсказуемым результатам и придётся переделывать плату.
Травление печатных плат
Эта тема была раскрыта много раз, и я не буду подробно описывать её.
Я использую , и он меня устраивает, а с опытом дает прекрасные результаты.
Для крепления платы к корпусу использовались липучки. Мне повезло, т.к. в моей машинке было много места для электроники под трубчатым каркасом.
Я забыл сфотографировать соединение платы драйвера двигателя с остальными платами, однако он хорошо стал и не занял много места в корпусе.

Программа
Мой код может быть не достаточно эффективен, но он работает.
Машинка
Мне удалось собрать CarServer на основе примера SocketServer, который я получил вместе с Wifi Sheild AsynLabs.
Вам необходимо будет ввести информацию о своей беспроводной сети в код Arduino. Когда машина включилась, дайте ей 15-45 секунд, чтобы установить соединение с маршрутизатором. Красный светодиод на WiFi Shield означает, что соединение установлено.
Я сделал эту программу при помощи C # и MS Visual Studio 2008. Я сделал хорошее окно, и автомобилем можно управлять стрелочками.

Почему бы не управлять машинкой с телефона?
Такая мысль появилась у меня примерно через неделю после покупки DroidX. Я начал экспериментировать и в конечном итоге использовал Android SDK. Я нашел аналогичные приложения, где для управления используется акселерометр. Смотря на эти приложения написал свое.
Вставить IP и порт, указанные в коде Arduino. Держите телефон горизонтально. Затем наклоните его от себя, чтобы ехать вперед и на себя, чтобы ехать назад. Используйте телефон как руль.
Это мое первое крупное приложение для Android. В нем до сих пор есть некоторые ошибки, но в основном оно работает нормально.
Рулите во дворе машинкой 4x4 с WiFi!
Я отлично провел время, создавая этот проект. Я получил много знаний и новых навыков, и теперь у меня есть машинка 4х4, которой можно управлять с телефона.
Мне нужна камера для установки за лобовым стеклом, чтобы смотреть куда ехать. Она должна быть с низким энергопотреблением, а также передавать видео сама по себе. (Я думаю, что Arduino справится с этим).

Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Драйвер двигателей | |||||||
| IC1 | Микросхема | SN754410 | 1 | В блокнот | |||
| Линейный регулятор | 5 В | 1 | В блокнот | ||||
| Биполярный транзистор | 2N3904 | 1 | В блокнот | ||||
| C1, C2 | Электролитический конденсатор | 2 | В блокнот | ||||
| Разьем | 2 вывода | 7 | В блокнот | ||||
| Разьем | 8 выводов | 1 | В блокнот | ||||
| Arduino Shield | |||||||
| U1 | Плата Arduino | 1 | В блокнот | ||||
| Т1 | Биполярный транзистор | 2N3904 | 1 | В блокнот | |||
| R1 | Резистор | 1 | В блокнот | ||||
| U$3 | Подстроечный резистор | 1 | В блокнот | ||||
| Разьем | 2 вывода | 2 | |||||
Это небольшой рассказ о том, как построить робота в виде игрушечного автомобильчика с видео камерой, которым можно управлять с помощью компьютера или смартфона на ОС Android через WiFi. Устройство не имеет никакой автономности в смысле своего поведения (типа распознавания чего-либо), управление - только от человека, поэтому «робот» - это не совсем подходящее слово в названии.
Началось все с того, что идея управления игрушечными устройствами от первого лица (т.н. FPV) мне показалась чрезвычайно интересной с точки зрения собственно процесса. Ведь мы можем таким образом реализовать свое присутствие, не в виртуальном мире, а в реальном.
Проще и быстрее всего применить эту идею на игрушечных или модельных автомобилях. Текущие технологии должны давать такую возможность промышленности и предложить массу подобных вещей. Однако это предложение оказалось достаточно дорогим по сравнению тем что можно сделать самому.
Так как это мой первый проект, я ни программировать, ни даже паять нормально не умел, и я решил сначала поискать в интернете единомышленников и их варианты решения данной задачи.
Начав изучение вариантов, как можно осуществить эту идею, я нашел очень подробное описание подобного проекта
. A его автор с радостью помог мне разобраться в проблемах, возникших при создании робота.
Так я впервые и узнал что такое …duino. Так как это был уже готовый вариант микроконтроллера, где не нужно было паять обвязку к нему, я выбрал именно его. Также очень понравилось присутствие бутлоадера, позволяющего прошивать микроконтроллер без программаторов.
Для реализации данного проекта понадобится:
- Микроконтроллер Arduino (любой: nano, uno, mega)
- Аккумулятор 9,6вольт
- Китайская машинка на радиоуправлении
- Роутер dir320 (или любой другой поддерживающий OPEN-WRT прошивку)
- Вебкамера Logitech c310 или любая другая с UVC потоком
Программ пять: на PC, на Android, на роутере (сервер управления и видеопоток), и в микропроцессоре.
Схема работы: соединяем настольный компьютер (ноутбук, далее - PC) с роутером по WiFi. На роутере при его включении автоматически загружаются 2е программы:
1) сервер. Эта программа открывает сокет (соединение) на определенном порту и ждет, когда по этому порту с ней соединится клиент (любая программа, которая обратится в этот порт и также, особым образом скажет серверу, что она готова работать через открытый сокет). Далее, после установки соединения, все что придет от клиента, будет перенаправлено по определенному пути, для нас это COM-порт, на этом порту подключен микропроцессор. И наоборот, все что придет со стороны COM-порта, будет переслано клиенту.
2) программа обработки видео, захватывает его с usb камеры и шлет на определенный порт. Для его просмотра нужно всего лишь иметь соединение с роутером на этом порту.
После того, как между компьютером и роутером установлено WiFi-соединение, запускаем на PC программу для управления роботом (тот самый клиент), эта программа соединяется с программой-сервером на роутере. Эта же или другая программа транслирует видео с WiFi роутера.
Далее, пользователь может управлять автомобильчиком и нажимает, например, кнопку «вперед». Программа на PC, отсылает команду «вперед» прямо на роутер, на его IP, но на определенный порт. На роутере, эта команда поступает в программу-сервер, т.к. выслана она на его порт, и в рамках открытого для этого сокета. Программа-сервер, ничего не делая с этой командой, просто отправляет её в COM-порт. Таким образом, команда «вперед» оказывается в микропроцессоре, который в ответ на нее, дает сигнал «вперед» на один из своих выводов. К таким выводам процессора подсоединена схема управления двигателями, т.к. сам микропроцессор управлять ими не может в силу своей маломощности.
Управлять исполнительным устройством через роутер, без микропроцессора не получится, т.к. микропроцессор может формировать сигналы «1» (напряжение >2,5v) или «0» (меньше обозначенного) на любом из десятка-другого своих выводов. У роутера же выводов нет, есть только порты ввода/вывода, типа USB или COM (serial), в которых по 2-3 провода.
Теперь часть практическая. Заранее скажу, что несмотря на кажущиеся сложности, все на самом деле просто, если речь идет о простом копировании этого проекта – ведь все уже сделано и работает. Нужно просто выполнить в точности эту инструкцию.
Изначально микроконтроллером был freeduino maxserial у которого был com port, который был одним из немногих(как я тогда считал) для подключения к uart роутеру, для этого нужно было паять переходник с uarta на com чтобы соединить его с роутером. Его брать я не очень хотел, так как оригиналом есть все-таки Arduino, да и Freeduino в Украине нет.

Как я выяснил потом, все было это просто излишнее нагромождение схемы. Обойтись можно всего 1 проводком который будет идти от TX роутера(на рисунке) к RX (0 пин) микроконтроллера.
Непонятно почему но на фридуине оказалось для нормального подключения нужно tx на tx. Скорее всего просто неверно нанесено обозначение. (тут 0 пин tx) По этому лучше брать оригинальный
.
Машинку я купил хорошую, хоть и китайскую

Машинка оказалась очень мощная, 5 кг на ровной поверхности тянула очень уверено. Также у нее в комплекте шел аккумулятор на 6 вольт. Что касается электроники, то в машинке уже есть готовый драйвер двигателей, на который можно подать управляющие слаботочные выходы с микроконтроллера (если бы с машинкой не повезло - драйвер моторов можно было взять тоже от arduino)
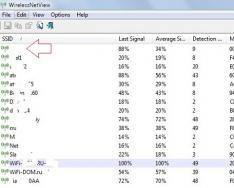
Роутер требует прошивку openwrt и список пакетов указанных на рисунке.

Роутер можно настроить как точку доступа, которой могут подключится любые устройства, имеющие WiFi. И, даже если не будет программного обеспечения для управлении машинкой – использовать ее как беспроводную камеру видеонаблюдения.
Камера с310 просто подключается к порту usb на роутер и не требует пайки, требует небольших настроек в роутере. Проект имеет 2 цепи питания, 1 цепь питается от 9,6 вольт - роутер и микроконтроллер, 2 цепь питается от 6 вольт - привод и рулевое машинки. Можно обойтись всего 1 источником питания в 9,6 вольт, но более емкостным. Роутер потребляет 2А, микроконтроллер потребляет почти незаметно, машинка 4А.
Программа микроконтроллера обрабатывает сообщения, которые приходят с последовательного порта роутера, обработка происходит побайтово через portb arduino, например если пришло в роутер 2, то, переведя в двоичную систему получаем 00000010 – что соответствует 2 пину на portb. Такое решение позволяет управлять одновременно несколькими пинами. Вот что получилось в итоге:

Приложение для андроид:

Приложение для пк:

Данный проект еще не закончен и продолжает совершенствоваться.
В планах использовать arduino mega, роутер mr3020, вебакамеру оставить как есть(возможно добавить сферическую линзу для большего обзора), задействовать шим для плавного и точного управления, использовать сервопривод для поворотов, добавить дальномер. Добавить видео на Android.
- полный каталог плат
Роутер
Обнаружив в своем городе роутер D-Link DIR-320, у которого есть USB порт, сразу же его купил. Придя домой, узнал, что у этого роутера есть невыведенный UART-порт. Таким образом, у нас появляется канал связи между роутером и ардуиной.Для роутера я выбрал прошивку OpenWrt. Можно скачать готовую прошивку с OpenWrt для DIR-320 это . Уже не помню почему, но я решил собрать прошивку сам (подробно описано ). Для этого понадобится Linux (я собирал на Ubuntu 11.10). Для начала, скачаем исходники прошивки и соберем все, что нужно:
svn co svn://svn.openwrt.org/openwrt/branches/backfire dir320 cd dir320 ./scripts/feeds update -a && ./scripts/feeds install –a make prereq && make tools/install && make toolchain/install
Конфигурирование прошивки
make menuconfig
Выбираем следующие пакеты:
- Target System ---> <*> Broadcom BCM947xx/953xx – ядро 2.6
- Image configuration ---> <*> LAN IP Address --->
– [не обязательно] Можно выбрать IP-адрес, который будет у роутера после загрузки ядра и всех модулей - Kernel modules ---> <*> Filesystems ---> <*> kmod-fs-ext3 - Об этом позже
- Utilities ---> Filesystem ---> <*> e2fsprogs – И об этом
- Utilities ---> disc ---> <*> block-extroot – И об этом тоже
- Kernel modules ---> <*> USB Support ---> <*> kmod-usb-core – поддержка USB
- Kernel modules ---> <*> USB Support ---> <*> kmod-usb-ohci – для USB-хаба. Зачем он? Об этом тоже позже
- Kernel modules ---> <*> USB Support ---> <*> kmod-usb-storage – поддержка USB-флешек
- Kernel modules ---> <*> USB Support ---> <*> kmod-usb2 – USB 2.0
- Administration --> webif ---> <*> webif-applications – админка
- Kernel modules ---> <*> Video Support ---> <*> kmod-usb-video-core – поддержка USB-video
- Kernel modules ---> <*> Video Support ---> <*> kmod-usb-video-uvc – поддержка UVC-веб камер
Так зачем же мы выбрали те пакеты, назначение которых я не объяснил? Проблема в том, что объём флэш-памяти установленной в роутере - 4МБ, что может помешать дальнейшей нашей работе. Мы же перенесем rootfs на флешку, и роутер будет грузиться с нее.
Кстати, про флэш-память: нужно не забыть следующее:
make kernel_menuconfig
- Device Drivers ---> <*> Memory Technology Device (MTD) support ---> RAM/ROM/Flash chip drivers ---> [*] Flash chip driver advanced configuration options --> [*] Specific CFI Flash geometry selection --> [*] Support 8-bit buswidth
- Device Drivers ---> <*> Memory Technology Device (MTD) support ---> RAM/ROM/Flash chip drivers ---> [*] Flash chip driver advanced configuration options --> [*] Specific CFI Flash geometry selection --> [*] Support 16-bit buswidth
Компилируем и прошиваем
Компиляция прошивки:make V=99 -j2
Теперь нужно ее прошить:
Для bash’а:
#!/bin/bash echo "==================================================================" echo "This script will upload dd-wrt firmware (firmware.bin)" echo "in the current directory to 192.168.0.1 " echo "during the router"s bootup. " echo "" echo "* Set your ethernet card"s settings to: " echo " IP: 192.168.0.10 " echo " Mask: 255.255.255.0 " echo " Gateway: 192.168.0.1 " echo "* Unplug the router"s power cable. " echo "" echo "Press Ctrl+C to abort or any other key to continue... " read echo "" echo "* Re-plug the router"s power cable. " echo "" echo "==================================================================" echo "Waiting for the router... Press Ctrl+C to abort. " echo "" try(){ ping -c 1 -w 1 192.168.0.1 } try while [ "$?" != "0" ] ; do try done echo "*** Start Flashing **** " atftp --no-source-port-checking -p -l firmware.bin 192.168.0.1 echo "Firmware successfully loaded!"
Для винды:
@echo off echo ================================================================== echo This batch file will upload dd-wrt firmware in the current directory to echo 192.168.0.1 during the router"s bootup. echo. echo * Set your ethernet card"s settings to: echo IP: 192.168.0.2 echo Mask: 255.255.255.0 echo Gateway: 192.168.0.1 echo * Unplug the router"s power cable. echo. echo Press Ctrl+C to abort or any other key to continue... pause > nul echo. echo * Re-plug the router"s power cable. echo. echo ================================================================== echo Waiting for the router... Press Ctrl+C to abort. echo. set FIND=%WINDIR%\command\find.exe if exist %FIND% goto LPING set FIND=%WINDIR%\system32\find.exe if exist %FIND% goto LPING set FIND=find:LPING ping -n 1 -w 50 192.168.0.1 | %FIND% "TTL=" if errorlevel 1 goto LPING echo *** Start Flashing **** tftp -i 192.168.0.1 put firmware.bin if errorlevel 1 goto LPING set FIND= echo. echo ================================================================== echo * WAIT for about 2 minutes while the firmware is being flashed. echo * Reset your ethernet card"s settings back to DHCP. echo * The default router address will be at 192.168.1.1 echo. Pause
Настройка загрузки с флешки
После первого включения заходим на веб-интерфейс роутера и изменяем пароль. Теперь подключаемся к нему через SSH. Нужно настроить загрузку с флешки, для этого сначала нужно ее разметить. У меня было два раздела: первый – ext3-раздел для rootfs, второй – swap. Открываем /etc/config/fstab в vim’е и пишем то, что соответствует нашей фелшке. У меня так:config global automount option from_fstab 1 option anon_mount 1 config global autoswap option from_fstab 1 option anon_swap 0 config mount option target / option device /dev/sda1 option fstype ext3 option options rw,sync option enabled 1 option enabled_fsck 1 option is_rootfs 1 config swap option device /dev/sda2 option enabled 1
Сохраняем, перезагружаемся (reboot).
Демон
Управлять двигателями будет ардуина, поэтому напишем демон, который будет перенаправлять всё, что пришло на TCP порт 5554 в /dev/ttyS0.Мой скомпилированный вариант демона искать в архиве (card)
Компилируем с помощью gcc, который был собран в процессе подготовки к сборке прошивки:
<…>/dir320/staging_dir/toolchain-mipsel_gcc-4.3.3+cs_uClibc-0.9.30.1/usr/bin/mipsel-openwrt-linux-uclibc-gcc-4.3.3 <имя файла с исходниками> -o <имя выходного файла>
Небольшое отступление об удобстве организации работы с роутером
- После каждого включения мне приходилось писать opkg update , поэтому я его добавил в /etc/rc.local
- Довольно удобно использовать FTP-сервер. Я поставил pure-ftpd. Для этого пишем:
opkg install pure-ftpd
Добавим его в /etc/rc.local:
pure-ftpd -4 –B –M –l unix –U 000:000 - Удобно будет сменить веб-интерфейс на luci, для этого пишем:
opkg remove webif* opkg install luci
Демон [продолжение]
Заливаем на роутер наш демон, добавляем его в автозагрузку.Теперь ставим mjpg-streamer:
opkg install mjpg-streamer
Пишем в /etc/config/mjpg-stramer следующие:
config mjpg-streamer option device “/dev/video0” option resolution “640x480” option fps “24” option port “8080” option enabled “true”
Пробуем подключить камеру. Если все нормально, то можно будет увидеть изображение тут:
http://
Arduino и соединение
Для начала определимся со схемой подключения двигателей. Так как я брал корпус от уже готовой машинки, то мне с двигателями повезло – они уже там были. Передний отвечал за повороты (влево, вправо, прямо), а задний за движение (мне пришлось его поменять на двигатель кнопки блокировки дверей какого-то ВАЗа). Управлять нагрузками можно ардуиной с помощью полевых транзисторов (95N2LH5, но я использовал IRF 630, потому что и эти ели нашел в своём городе). Подключение такое: земля транзистора – к управляющему пину ардуины, source – к земле ардуины и минусу питания нагрузки, drain – к минусу нагрузки, плюс питания к плюсу нагрузки. Но таким образом мы сможем ездить только вперед и поворачивать только в одну сторону. Для того чтобы справиться с проблемой, к нам на помощь спешит реле с двумя группами контактов. У меня один двигатель (передний) питался 6 вольтами, а другой 12. При этом использовалось два 6 вольтовых аккумулятора (один из них - свинцово-кислотный от бесперебойника), учитывая, что минус роутера позже придется соединить с землей ардуины, то получить 6 вольт для роутера не получается (проверяйте сколько вольт подаёте на роутер - мне пришлось покупать еще один после того, как я подал на него 12 вольт). Поэтому пришлось использовать еще одну релюшку для подачи/неподачи питания на передний двигатель.Схему рисовал давно. Теперь там все транзисторы полевые и нет резисторов.
Теперь о самом коде. У меня все довольно просто – есть 4 команды, у которых есть свой параметр размером 1 байт:
- m – Отвечает за напряжение, а, следовательно, и за скорость, на двигателе значение от 0 до 255
- r – Отвечает за повороты. “1” – поворачивать, “0” – не поворачивать
- n – “1” – ехать назад, “0” – ехать вперед
- e – “1” – поворачивать в другую сторону
int inByte, val; void setup() { Serial.begin(9600); pinMode(2, OUTPUT); pinMode(4, OUTPUT); pinMode(7, OUTPUT); } void loop() { if (Serial.available() > 0) { inByte = Serial.read(); if ((inByte=="n")||(inByte=="e")){ while (Serial.available()==0) {} val=Serial.read(); if (inByte=="n"){ if (val=="1"){ digitalWrite(2, HIGH); Serial.print("Writing to 2 pin\n\r"); } if (val=="0"){ digitalWrite(2, 0); Serial.print("Writing to 2 pin\n\r"); } } if (inByte=="e"){ if (val=="1"){ digitalWrite(4, HIGH); Serial.print("Writing to 4 pin\n\r"); } if (val=="0"){ digitalWrite(4, LOW); Serial.print("Writing to 4 pin\n\r"); } } } if ((inByte=="m")||(inByte=="r")){ while (Serial.available()==0) {} val=Serial.read(); if (inByte=="m"){ if (val!="0") analogWrite(3, val); else analogWrite(3, 0); Serial.print("Writing to 3 pin\n\r"); } if (inByte=="r"){ if (val=="1"){ digitalWrite(7, HIGH); Serial.print("Writing to 7 pin\n\r"); } if (val=="0"){ digitalWrite(7, LOW); Serial.print("Writing to 7 pin\n\r"); } } } } }
Как видно, задний двигатель у меня подключен к 3 пину, передний – к 7, реле заднего – к 2 пину, переднего – к 4. Так как 3 – это ШИМ-пин, то используя analogWrite(3, val);, где val от 0 до 255, мы можем управлять напряжением на двигателе.
Разбираем наш маршрутизатор. Видим UART порт. Соединяем его с ардуиной.

Теперь смотрим, как это все работает. Подключаемся телнетом к нашему порту и проверяем:
- n1 – щелкает реле
- m<пробел> - колёса начинают немного вращаться
- n0 – колеса вращаются в другую сторону
- m0 – колеса перестают вращаться
- r1 – поворачивают передние колеса
- e1 – колеса поворачивают в другую сторону
- r0 – колеса становятся прямо
- e0 – щелкает реле
Программная часть
В архиве моя программка для управления машинкой (rotate и power из архива нужно скопировать в /bin/ на роутере, card – мой демон). Работает только с джойстиком. На вкладке планирование вы можете написать bash скрипт (не забудьте opkg install bash на роутере) для его выполнения с помощью демона cron. Так как этот демон нужно после изменения его настроек перезапускать, моя программа запускает скрипт по адресуТут я расскажу про переделку аппаратуры радиоуправления моделями в диапазон 2,4 ГГц.
До недавнего времени пользовался аппаратурой Hitec Eclipse 7 совместно с модулем Corona 2,4 . Проблем со связью никогда не возникало. Проблемой стали стандартные антенны WI-FI, точнее их механическая надёжность. Отломалась уже вторая антенна в области поворотной части, две детали антенны просто запрессованы и при их разделении отрывается впаянная центральная жилка антенны.

После этого передающая антенна 2,4ГГц ремонту не подлежит! Цена её копеечная, но не везде их продают и дальнейшее пользование данной конструкцией вызвало у меня недоверие.После неудачных попыток найти отдельно такую антенну купил вот такую, с названием TP-LINK.

Она в два раза больше по длине и по данным из краткой инструкции полностью совместима со всеми системами 2,4ГГц, но обладает большим усилением, а точнее 5дБ по сравнению со стандартной Короновской 2-3дБ и соответственно дальностью связи. При эксперименте с модулем Corona 2,4 не было замечено ни каких отклонений в поведении подопытного пенолёта. Далее решено было перенести данную антенну на место штатной 40МГц и модуль Корона разместить внутри аппаратуры, а не как сменный блок.
В результате получился улучшенный пульт 2,4 :
- Антенна доступна визуально
- Отсутствие разъёмных контактов при подключении модуля
- Ну и внешний вид конечно
Далее по порядку о переделке "40МГц" в пульт RC 2,4ГГц
Вскрыл аппаратуру и модуль. В аппаратуре найдено место для установки платы модуля с его нижней крышкой для удобства крепления.

Крышка прикручена на саморезы в отверстия выключателя питания. Саморезы взял чуть подлиннее чем на выключателе.

Закрыв головки саморезов кусочком изоленты вставил плату и с четырех сторон в крышку закрутил 4 маленьких самореза, они прижали плату модуля.
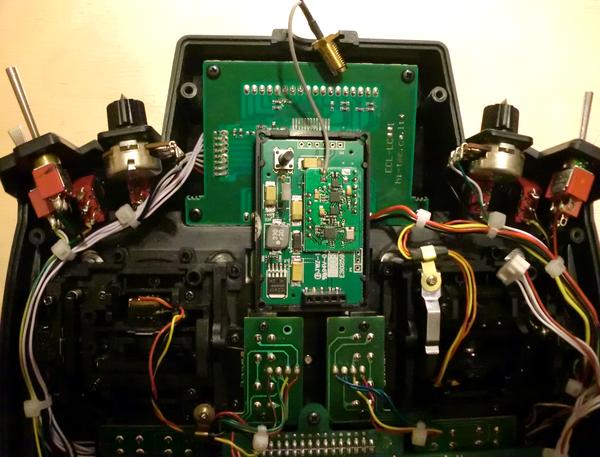
К плате подходит всего 3 провода:
- плюс питания
- общий
- сигнал управления

Для доступа к кнопке модуля и контроля светодиода при привязке приёмников в пазу для стандартного модуля вырезаем небольшое отверстие и закрываем его пустым!!! модулем.
Данная антенна 2,4 чуть толще штатной 40МГц, её толщина примерно 12мм, пришлось немного высверлить отверстие. Антенна зафиксирована холодной сваркой только за нижнюю, крутящуюся часть, чтобы была возможность вращать её вокруг оси и сделать пульт rc максимально удобным.

Сборка передатчика 2,4
При сборке передатчика нужно сблизить две половины корпуса и закрутить в антенну антенный штекер от модуля, предварительно сделав им несколько оборотов против часовой стрелки. Всё, скручиваем передатчик 2,4. Проверяем его работоспособность и пользуемся.

Аппаратура 2,4 проверена в полевых условиях, всё в норме!
Таким способом можно переделать практически любую систему радиоуправления моделями. Как переделать пульт RC в 2,4 - я написал, в дальнейшем планируются ещё публикации о переделке аппаратуры и сборке нужных моделисту электронных устройств.
Внимание!
Вся ответственность за сгоревшую аппаратуру и заморковленную модель ложится исключительно на Вас, по этому без опыта и знаний начальных азов электроники категорически не советую даже просто разбирать аппаратуру!
Инструменты